Non ci sono prodotti a carrello.

I transceiver per CAN-bus senza bobina di blocco consentono ai progettisti di sistemi di ridurre le dimensioni, i costi e la complessità delle implementazioni, pur rispettando i severi requisiti EMC per l’automotive.
La densità dell’elettronica nelle automobili cresce di anno in anno ed è quindi importante garantire che le reti di bordo mantengano un elevato livello di prestazioni in merito alla compatibilità elettromagnetica (EMC), assicurando che i vari sottosistemi continuino a funzionare come previsto, una volta integrati in una soluzione più ampia e gestiti in un tipico ambiente (rumoroso). Sebbene esistano molti standard di rete diversi per l’uso a bordo di un veicolo e una gran varietà di requisiti EMC da parte dei costruttori OEM per il settore automobilistico, questo articolo si concentra su un argomento che si è rivelato particolarmente impegnativo: le emissioni in radiofrequenza (RF) da un impianto CAN-bus (Controller Area Network).
La tecnologia CAN utilizza una segnale differenziale bilanciato per inviare dati binari a velocità di trasmissione fino a 1 Mbps (o superiore, se si utilizza la variante «flexible data rate»). Teoricamente, l’utilizzo della tecnica differenziale impedisce l’accoppiamento esterno di qualsiasi rumore. Poiché ciascuna metà della coppia differenziale (denominate CANH e CANL) varia in modo simmetrico, i contributi del rumore di ciascuna di esse si annullano. Tuttavia, nessun transceiver CAN è un sistema ideale e piccole asimmetrie tra i segnali CANH e CANL possono dare origine a un segnale differenziale non perfettamente bilanciato. In questo caso, la componente di modo comune del segnale CAN (ossia la media tra CANH e CANL) non è più un valore in CC costante, ma, invece, presenterà del rumore.
Due tipi principali di squilibrio possono essere la causa di questo rumore. Uno di essi è una discrepanza tra i livelli di tensione di modo comune allo stato stazionario che si verificano durante gli stati dominante (guidato) e recessivo (ad alta impedenza). L’altro è una differenza nella temporizzazione tra i segnali CANH e CANL durante la loro transizione fra questi due stati.
La mancata corrispondenza nello stato stazionario produce un modello di rumore che assomiglia a una riproduzione in scala dei dati CAN stessi. Questo modello di rumore presenta un ampio contenuto di frequenza, che appare come una serie di linee spettrali discrete, distanziate uniformemente e che si estendono fino a frequenze molto basse. Il disallineamento della temporizzazione produce un modello di rumore costituito da brevi impulsi o disturbi che insorgono ogni volta che si verifica una transizione sul fronte all’interno dei dati. Questo modello di rumore tende ad avere un contenuto spettrale prevalentemente a frequenze più alte.
La forma d’onda in Figura 1 mostra un esempio del rumore di modo comune che può essere osservato sull’uscita di un tipico transceiver CAN. In questa immagine, la traccia nera (Canale 1) mostra CANH, la traccia viola (Canale 2) mostra CANL e la traccia verde (funzione matematica) è la somma di CANH e CANL. Questa sommatoria fornisce una forma d’onda il cui valore è uguale al doppio della tensione di modo comune in un dato punto temporale.
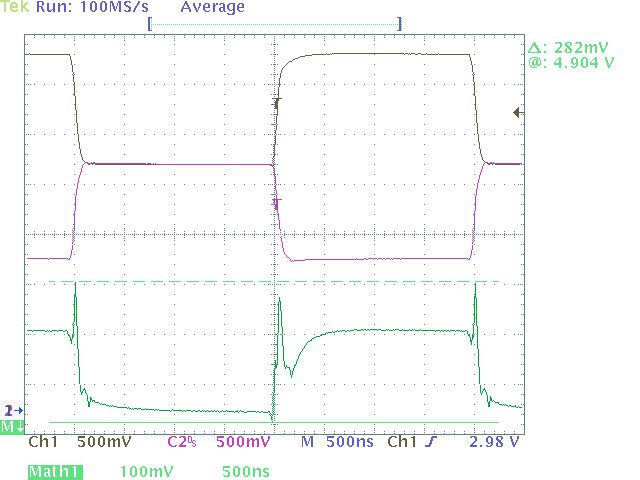
Figura 1: tipiche uscite CANH/CANL del transceiver CAN e rumore di modo comune
La forma d’onda di modo comune mostra entrambi i tipi di rumore: rumore ad alta frequenza, corrispondente a transizioni da dominante a recessivo/da recessivo a dominante, e rumore a bassa frequenza, corrispondente a modi comuni dominante e recessivo non corrispondenti.
Poiché la porzione di modo comune del segnale può accoppiarsi (attraverso percorsi irradiati o condotti) ad altri componenti di un sistema (oppure a sistemi esterni), questo rumore di modo comune influisce direttamente sul valore delle emissioni. Le emissioni condotte di questo dispositivo, misurate con la metodologia dell’IBEE (Engineering Services for Industrial Electrical Engineering/ Electronics) di Zwickau, sono tracciate insieme a una linea limite comune per i costruttori OEM in ambito automobilistico in Figura 2.
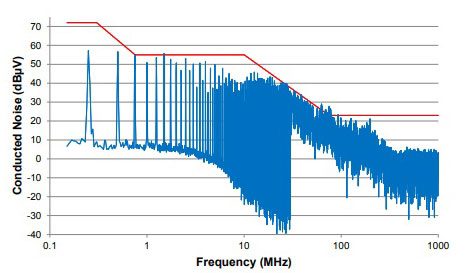
Figura 2: emissioni condotte di un tipico transceiver CAN
Le emissioni in uscita del transceiver superano i requisiti OEM sia nelle regioni a bassa frequenza che in quelle ad alta frequenza. Per ridurre le emissioni a un livello soddisfacente è necessario utilizzare alcuni filtri esterni.
Il componente di filtro usato più comunemente nei CAN-bus è una bobina di blocco di modo comune (come mostrato in Figura 3). Una bobina di blocco di modo comune è costituita da due bobine di filo che condividono un nucleo comune. La direzione degli avvolgimenti di ciascuna bobina è tale che le correnti di modo comune (ossia le correnti che attraversano ciascuna bobina nella stessa direzione) presentino flussi magnetici che condividono la stessa polarità. Ciò consente alla bobina di blocco di agire come induttore per i segnali di modo comune, fornendo un’impedenza che cresce all’aumentare della frequenza. Viceversa, le correnti di modo differenziale (ossia le correnti che attraversano ciascuna bobina in direzioni opposte) presentano flussi magnetici che interagiscono con polarità opposte. Per una forma d’onda bilanciata come un segnale CAN, i flussi magnetici opposti di ciascuna bobina saranno uguali in termini di grandezza e, quindi, nessun flusso netto si accumulerà nel nucleo. Ne risulta che la bobina di blocco agisce come cortocircuito per i segnali CAN.
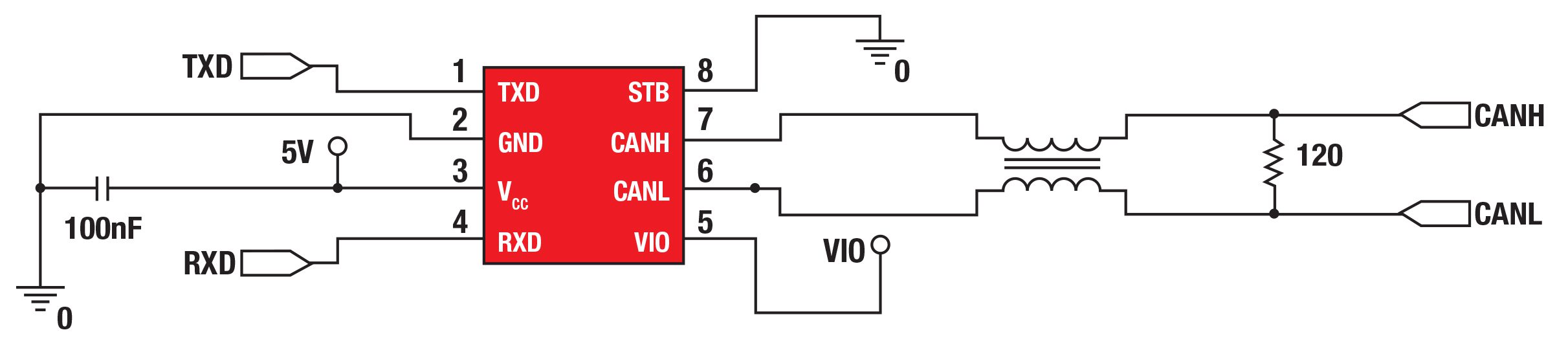
Figura 3: schema di bobina di blocco di modo comune
Questa tecnica può essere molto efficace nel ridurre le emissioni di un CAN-bus. Ad esempio, quando il dispositivo sopra descritto ha dimostrato di non riuscire a soddisfare i requisiti di emissione ed è stato riesaminato con una bobina di blocco di modo comune da 51 μH, le prestazioni sono migliorate in modo significativo (Figura 4).
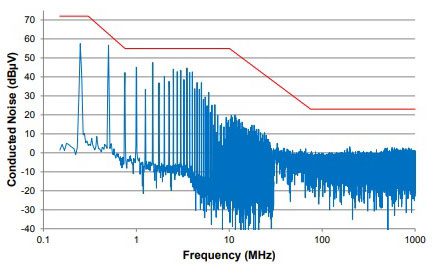
Figura 4: emissioni condotte di un tipico transceiver CAN (con bobina di blocco di modo comune)
Tuttavia, l’aggiunta di una bobina di blocco di modo comune presenta diversi svantaggi. Tra gli ovvi svantaggi dell’utilizzo di una bobina di blocco di modo comune vi sono lo spazio aggiuntivo richiesto sul circuito stampato e i costi aggiuntivi sostenuti nella distinta base. Inoltre, tuttavia, sono presenti alcuni effetti più subdoli sul CAN-bus che dovrebbero essere considerati. Poiché le bobine di blocco introducono una certa induttanza in serie, è possibile creare delle risonanze quando questa induttanza si combina con la capacità parassita della rete CAN. Nonostante la riduzione del rumore di modo comune nella maggior parte delle bande di frequenza, queste risonanze fanno aumentare la quantità di rumore alla frequenza di risonanza. Questo effetto è osservabile nella forma d’onda del rumore di modo comune mostrata in Figura 5.
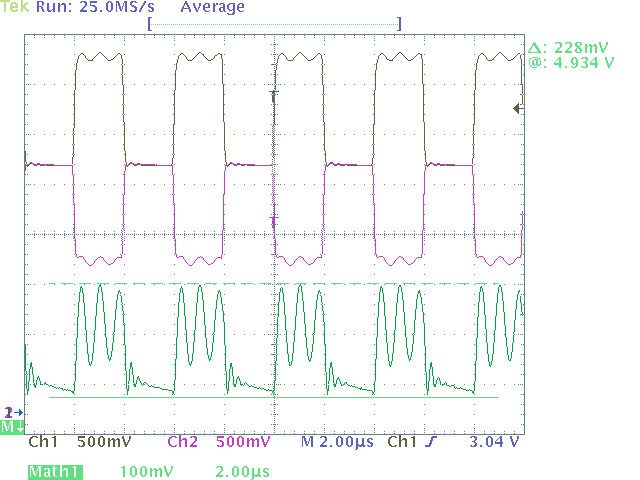
Figura 5: rumore di modo comune derivante dall’induttanza della bobina di blocco
Questo rumore a banda stretta può essere particolarmente difficile da gestire, in quanto tende ad avere una grande ampiezza, e la sua frequenza può variare da sistema a sistema a causa della variazione dell’induttanza della bobina di blocco e della capacità del bus. Si noti che il valore dell’induttanza di una tipica bobina di blocco di modo comune viene in genere specificato con ampi intervalli di tolleranza (ad esempio -30% / +50% rispetto al valore nominale). Analogamente, la capacità del bus di una rete CAN varierà in base al tipo e alla lunghezza del cablaggio utilizzato, al numero di nodi sulla rete e alla progettazione di ciascun nodo.
Un’altra conseguenza non intenzionale dell’induttanza della bobina di blocco di modo comune è un maggior rischio di elevate tensioni transitorie sul bus. Condizioni di guasto, come un cortocircuito dell’alimentazione, la tensione della batteria o la messa a terra del sistema, possono causare improvvisi cambiamenti nelle correnti di modo comune. Ciò si verifica sia al collegamento/scollegamento del cortocircuito sia durante la transizione del driver CAN da uno stato dominante a uno recessivo. Quando la corrente che attraversa l’induttanza della bobina di blocco cambia rapidamente, si crea un grosso potenziale di tensione sui terminali CAN del circuito integrato del driver. In alcuni casi, questa tensione può superare le capacità di gestione delle sovratensioni transitorie del dispositivo CAN e provocare danni permanenti.
Per ridurre le emissioni senza dover fronteggiare gli svantaggi correlati a una bobina di blocco di modo comune esiste una soluzione alternativa: ridurre l’emissione del rumore di modo comune dal driver CAN. Tale soluzione potrebbe sembrare logica e lineare, ma richiede un’attenta progettazione da parte del produttore del semiconduttore. I livelli di tensione CANH e CANL durante gli stati recessivi e dominanti devono essere controllati rigorosamente per assicurarsi che la forma d’onda del bus CAN rimanga il più bilanciata possibile.
Inoltre, i tempi di transizione e lo sfasamento di temporizzazione tra le linee CANH e CANL, durante la loro transizione tra stati dominanti e recessivi, devono essere ben bilanciati per limitare il rumore di modo comune che si verifica nelle bande ad alta frequenza.
La forma d’onda transitoria per il transceiver CAN TCAN1042-Q1 di Texas Instruments è mostrata in Figura 6. I corrispondenti diagrammi delle emissioni sono riportati in Figura 7.
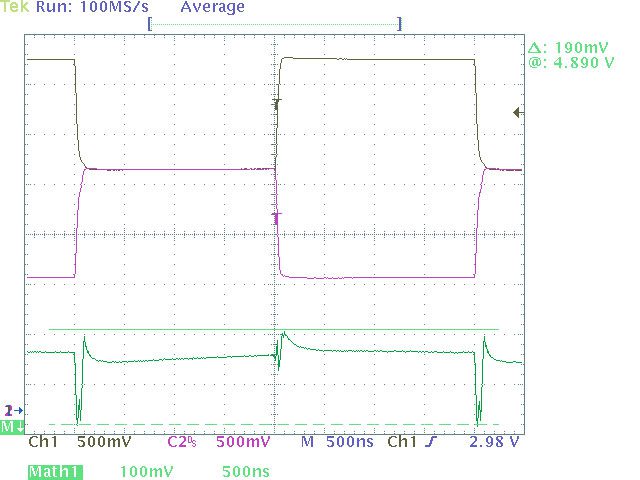
Figura 6: uscite CANH/CANL e rumore di modo comune
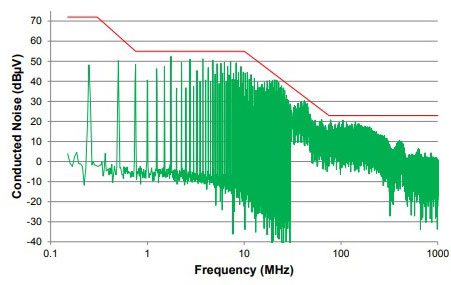
Figura 7: emissioni condotte di un transceiver CAN protetto da guasti di tipo automobilistico
Lo stadio di output ben coordinato del TCAN1042-Q1 permette di ottenere un rumore di modo comune a bassissima emissione, che si traduce in prestazioni di emissione adatte a rispondere ai requisiti OEM senza l’uso di componenti esterni di filtraggio di modo comune come le bobine di blocco.
Sebbene le bobine di blocco di modo comune siano oggi ampiamente utilizzate nell’industria automobilistica come un metodo per mitigare le problematiche di EMC nei CAN-bus, i nuovi transceiver ad alte prestazioni le rendono superflue. L’eliminazione delle bobine di blocco di modo comune consente di ridurre le dimensioni e i costi delle implementazioni del CAN-bus, evitando problemi come risonanze del circuito e picchi di tensione induttiva.
A cura di Maxwell Robertson, Applications Manager, Industrial Interface group, Texas Instruments