Il mondo della robotica e del machine learning è testimone di un progetto straordinario realizzato dal maker con lo pseudonimo “bbtrash”, che ha sviluppato un robot autonomo alimentato da un microcontrollore Espressif ESP32. La peculiarità di questo progetto sta nella scelta insolita del linguaggio di programmazione: PHP. Utilizzando la libreria Rubix ML, bbtrash ha creato un modello di apprendimento automatico in grado di controllare il robot.
Il robot di piccole dimensioni è dotato di un sensore fotografico e, in futuro, prevede l’integrazione di un sensore di collisione. La struttura è costruita intorno all’ESP32, con due motori servo a 360 gradi che pilotano cingoli in stile carro armato, montati su un telaio stampato in 3D. Questo robot invia flussi video a basso framerate a un server web, dove l’applicazione PHP elabora le immagini per localizzare oggetti e trasmettere comandi di controllo per guidare il robot verso il suo obiettivo.
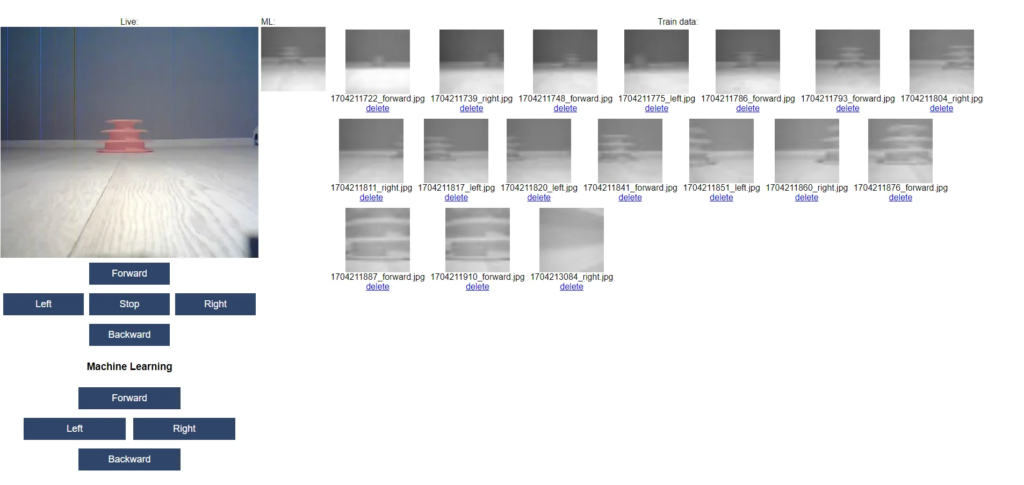
Una delle caratteristiche più affascinanti di questo progetto è la capacità di controllo remoto via internet e l’aggiunta di dati di addestramento per il modello di machine learning. Dopo l’addestramento, il modello può essere testato sul robot per valutarne il comportamento, come il seguire linee o oggetti. Inoltre, con l’aggiunta di un sensore di collisione, sarà possibile addestrare automaticamente nuovi modelli di machine learning in seguito a collisioni, senza interazione umana.
Questo progetto rappresenta un interessante esempio di come linguaggi tradizionalmente associati allo sviluppo web, come PHP, possano trovare nuove applicazioni nel campo emergente della robotica e dell’intelligenza artificiale.