Cosa sono gli encoder?
Gli encoder ottici, che sono dispositivi rotativi in grado di fornire impulsi corrispondenti alla posizione angolare del loro asse rotante, ma anche a velocità di rotazione e accelerazione. Per rilevare la rotazione esistono dispositivi analoghi che sfruttano le tecniche capacitiva e induttiva; in quest’ultimo caso si tratta del resolver, un tipo di trasduttore di spostamento induttivo, elettromeccanico, che permette la misura di spostamenti angolari attraverso il rilevamento della variazione del flusso di induzione magnetica, concatenato con un solenoide, in funzione della posizione del solenoide stesso rispetto al rotore.
Cosa è un resolver?
Il resolver è alimentato in corrente alternata e, a differenza dell’encoder, fornisce un segnale analogico alternato, la cui ampiezza è proporzionale all’angolazione misurata. Tipicamente, per come è costruito, nella sua forma di base il resolver rileva una rotazione entro 180°; ciò si comprende considerando che il sensore è formato da una bobina fissa (statore) e una o due rotanti solidali con l’albero. Esistono resolver più complessi, dotati di più avvolgimenti che permettono di rilevare l’angolo giro (rotazione completa).
Sostanzialmente il resolver è un trasformatore utilizzato per misurare l’angolo di rotazione e sovente si presenta come un motore elettrico, con uno o più avvolgimenti in rame sullo statore e un rotore fatto di lamierini in metallo. L’accoppiamento induttivo tra gli avvolgimenti del trasformatore varia in funzione dell’angolo di inclinazione del rotore rispetto allo statore, pertanto se si alimenta lo statore con un segnale in corrente alternata e si misura la tensione degli avvolgimenti del rotore, si ottiene un segnale elettrico in corrente alternata la cui ampiezza è proporzionale all’angolo formato dal rotore con gli avvolgimenti, giacché cambia l’intensità del flusso concatenato.
Anche se sono disponibili molte varianti e tipi diversi, un tipico resolver ha tre avvolgimenti sullo statore: uno che fa da primario e viene alimentato a corrente alternata e due che sono i secondari. Questi avvolgimenti sono realizzati con filo di rame e di solito sono formati sull’elemento stazionario del resolver (lo statore).
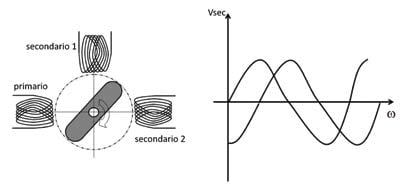
Schema resolver
Nell’immagine sopra è schematizzato il resolver del genere e come si vede il suo rotore è rettilineo a due poli salienti; ne deriva che quando è allineato, ossia si trova sull’asse del primario e di un secondario, viene trasferito il massimo flusso magnetico dal primario al secondario, quindi la tensione indotta ai capi di quest’ultimo è massima; invece quando l’asse è perpendicolare il flusso è minimo, giacché dipende dal coseno dell’angolo, che a 90° vale 0. La tensione sul secondario perpendicolare è quindi nulla.
Nel caso dell’encoder in figura, essendoci due secondari ortogonali tra loro, alimentando il primario con una tensione sinusoidale si otterranno le due tensioni d’uscita (sui secondari) proposte dal grafico: una forma d’onda sinusoidale ed una cosinusoidale. Come si vede, il rapporto tra i segnali varia in base all’angolo, il che permette di dedurre da esso di quanto sta ruotando il rotore.
Quale è il suo principale utilizzo?
Il resolver è realizzato in molte varianti e viene impiegato in controlli di processo industriale, robot industriali, macchine utensili, strumenti di misura, plotter, ma anche nelle trasmissioni delle moderne automobili.
2 Commenti