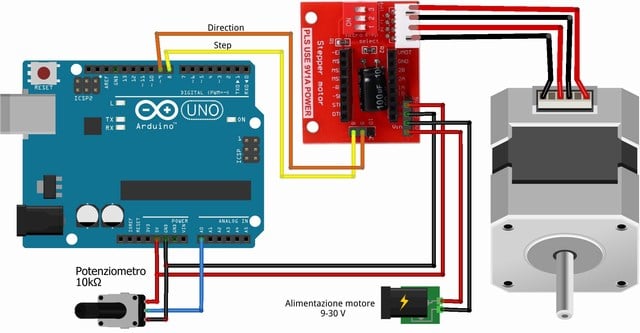
La board per driver A4988-DRV8825 è una piccola scheda che consente l’utilizzo dei moduli driver per motori passo-passo, come A4988, DRV8825 e altri con la stessa disposizione dei piedini. La scheda dispone di un connettore per l’inserimento del driver, un interruttore DIP per impostare il numero di step e tre connettori: uno per il controllo, uno per l’alimentazione e uno per collegare un motore passo-passo a 4 pin. Lo schema elettrico della board è stato ricavato dal PCB da AdriRobot poiché non è disponibile online.
La scheda presenta anche due pin-strip, J1 e J2, un connettore per il motore CN e un interruttore DIP.
J1 – Pin-strip per il controllo del motore Questo pin-strip consente la gestione della rotazione del motore ed è composto da 3 pin con le seguenti funzioni:
- E (Enable): Pin di abilitazione del driver, sempre collegato a terra tramite una resistenza da 4,7 kΩ. Pertanto, il modulo è sempre abilitato e non è necessario collegarlo ad Arduino.
- D (Direction): Pin che controlla la direzione di rotazione del motore. Portandolo a livello HIGH, il motore gira in senso orario, mentre portandolo a livello LOW, gira in senso antiorario. Se la direzione di rotazione è fissa, può essere collegato direttamente a +5V o GND.
- S (Step): Pin che controlla i microstep del motore. Ogni impulso ALTO inviato a questo pin fa avanzare il motore in base al numero di microstep selezionato tramite i pin di selezione. Aumentando la frequenza degli impulsi, il motore gira più velocemente.
J2 – Pin-strip per l’alimentazione A questo connettore vanno collegati i cavi di alimentazione, sia per la logica (+5V e GND) sia per l’alimentazione del motore. Il valore indicato di 9V per l’alimentazione del motore è solo indicativo. Purtroppo, non sono previsti connettori a vite per il collegamento del motore, il che potrebbe comprometterne la stabilità.
Il connettore del motore è di tipo JST XH a 4 pin, passo 2,5 mm, ed è polarizzato. Il motore passo-passo dovrebbe avere lo stesso tipo di connettore. È possibile utilizzare anche un connettore femmina a 4 pin tipo DUPONT, passo 2,5 mm. In caso di inversione della rotazione del motore, basta invertire il connettore.
Leggi l’articolo completo dal sito di AdriRobot