Non ci sono prodotti a carrello.
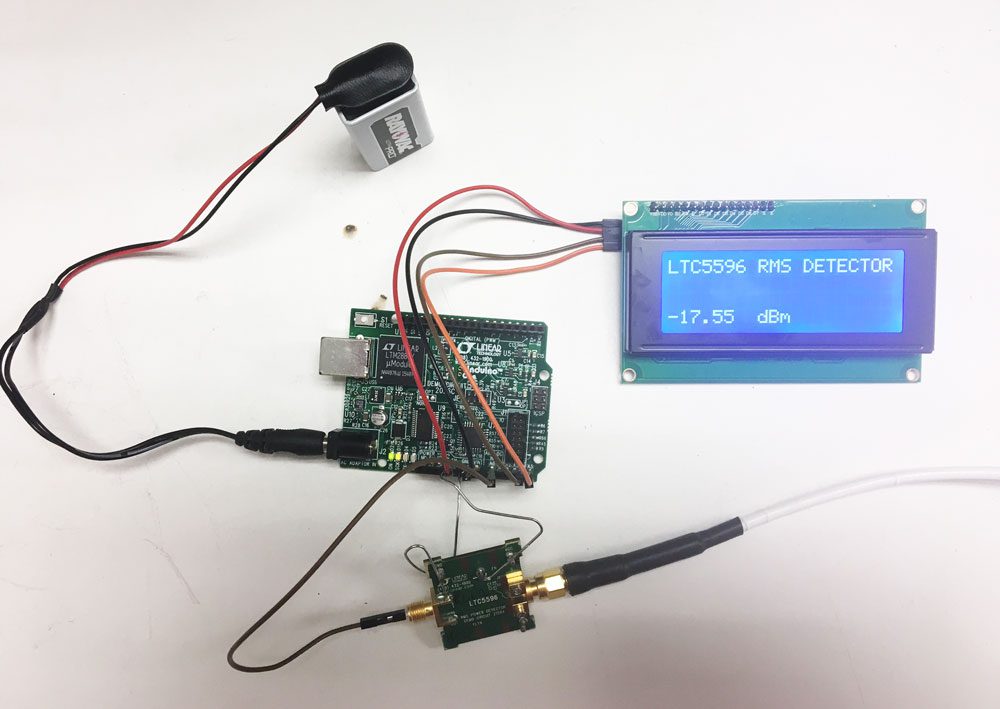
I misuratori di potenza RF basati sul valore RMS sono largamente utilizzati nella strumentazione per determinare con accuratezza e precisione la potenza di segnali RF con fattori di cresta variabili. Questi costosi dispositivi modulari offrono un livello di precisione elevato, garantito da procedure elaborate di caratterizzazione e calibrazione, ma tale precisione ha un costo in termini di dimensioni e investimento. Per realizzare un misuratore di potenza a banda larga in versione portatile o embedded, mantenendo costi e dimensioni contenuti, può essere utilizzato l’LTC5596, un circuito integrato sensibile al valore RMS, da 100MHz a 40GHz, con un intervallo di misura di 35dB o superiore. La funzione di trasferimento lineare in dB ben controllata dell’LTC5596 e l’eccellente linearità in frequenza permettono una calibrazione facile, semplice come può esserlo una singola calibrazione a due punti su una frequenza intermedia, con l’accuratezza di misura di ±1dB sull’intervallo di frequenza da 150MHz a 30GHz. L’LTC5596, con un consumo di appena 100mW e la sua struttura integrata, rende possibili soluzioni di monitoraggio di potenza su circuito e portatili. Nel circuito di esempio della Figura 1, viene riportata una soluzione completa per realizzare un misuratore di potenza RF a banda larga alimentato a batteria, semplicemente utilizzando il circuito demo dell’LTC5596 (DC2158A), un display LCD I2C e la scheda Linduino DC2026C che esegue un breve programma.
Figura 1. Misuratore di potenza RF a banda larga completo
Tabella 1. Elenco dei componenti
| Descrizione | Codice componente |
| Scheda demo LTC5596 | DC2158A |
| Scheda Arduino | Linduino DC2026C o compatibile |
| Display LCD I2C | Smraza 2004 LCD Display Module (20×4) |
| Batteria 9V e fili di cablaggio |
Realizzazione del circuito
La Figura 2 mostra lo schema di collegamento. La scheda Linduino ha diversi ingressi ADC nell’Analog IN bank: in questo caso, per campionare l’uscita del rilevatore LTC5596, viene utilizzato l’ingresso A0. Il display dispone di un’interfaccia I2C che semplifica i collegamenti alla scheda Linduino. L’intero sistema, inclusa la scheda LTC5596, è alimentato attraverso la porta ausiliaria della scheda Linduino.
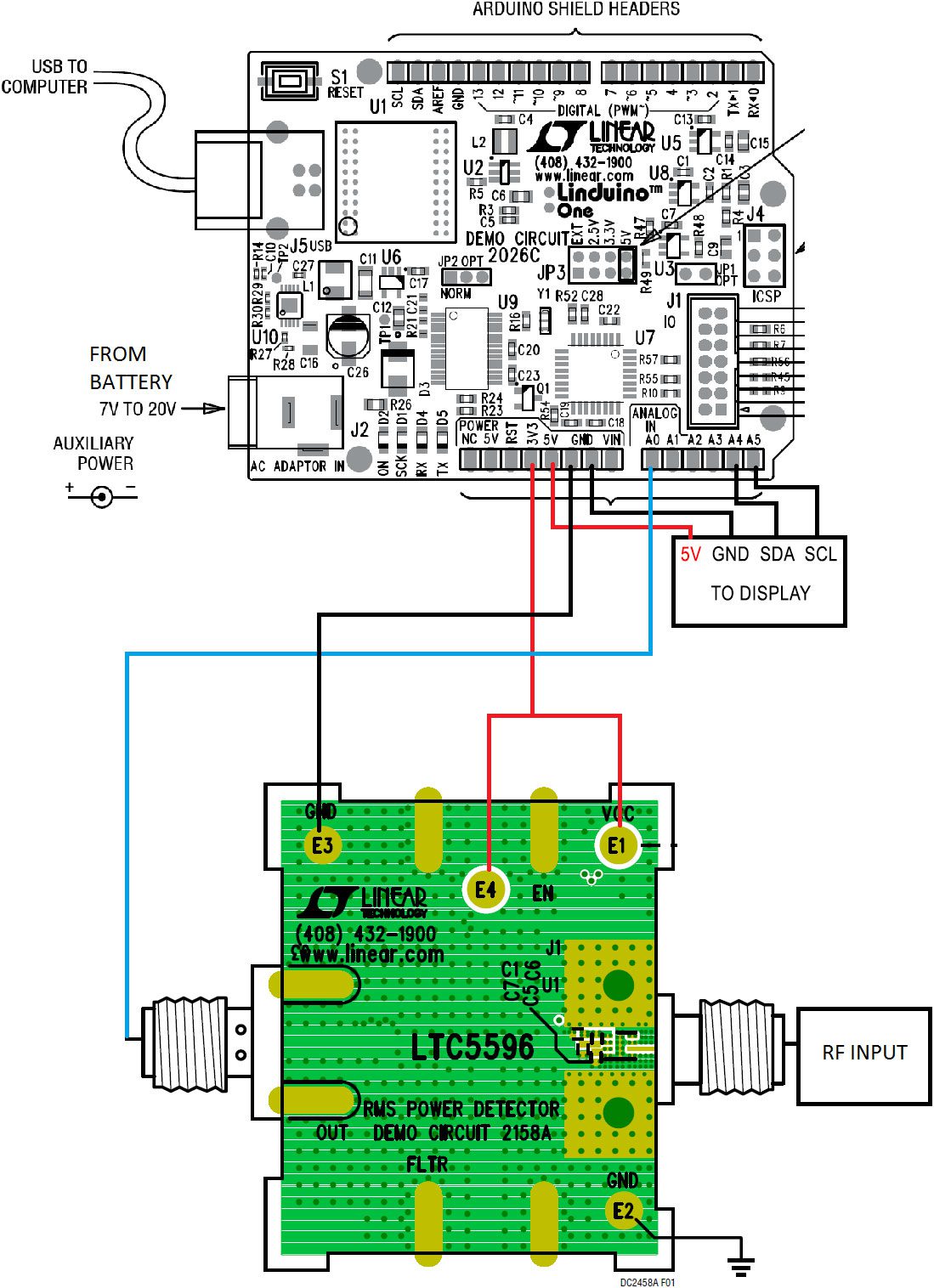
Figura 2. Schema di collegamento
Firmware
Tutto il firmware necessario viene eseguito sulla scheda Linduino. La sua funzione principale è di convertire il valore misurato all’ingresso analogico (volt) in quello di potenza RF (dBm) per poi visualizzarlo sul display LCD. A tale scopo, per trovare la pendenza e il punto d’intersezione della funzione di trasferimento lineare – VOUT su potenza RF – dell’LTC5596, si raccomanda di eseguire una calibrazione a due punti nella forma lineare:
y = (x – b)m
dove x è la potenza d’ingresso espressa in dBm, y è la tensione d’uscita (VOUT) dell’LTC5596 che è direttamente proporzionale al codice dell’ADC, m è la pendenza (slope) e b è l’intercetta x (il punto dove VOUT raggiunge lo 0). Il firmware calcola x in base al valore y misurato, con i valori b e m che derivano dalla calibrazione (descritta più avanti). Il calcolo del valore medio su letture multiple può aiutare a minimizzare gli effetti del rumore. L’ADC integrato sulla scheda Linduino ha una risoluzione di 10 bit, corrispondente a un size LSB di circa 4,9mV. La pendenza tipica dell’LTC5596 è 28,5mV/dB, corrispondente a una risoluzione di misura di circa 0,2dB. In appendice viene riportato il codice di esempio utilizzato per visualizzare la potenza d’ingresso in dBm alla frequenza di 5,8GHz.
Calibrazione
Nonostante l’LTC5596 sia dotato di una funzione di trasferimento lineare in dB, le variazioni da componente e componente comportano un range di pendenze della funzione di trasferimento e punti d’intersezione differenti sugli assi. Dato che la funzione di trasferimento è lineare, la calibrazione è semplice e richiede soltanto due punti (o più, se si desidera) per garantire l’accuratezza. La Figura 3 illustra la calibrazione a due punti di una tipica curva di trasferimento ricavata dall’LTC5596 a 5,8GHz. I due punti sono usati per ricavare la pendenza e l’intercetta x.
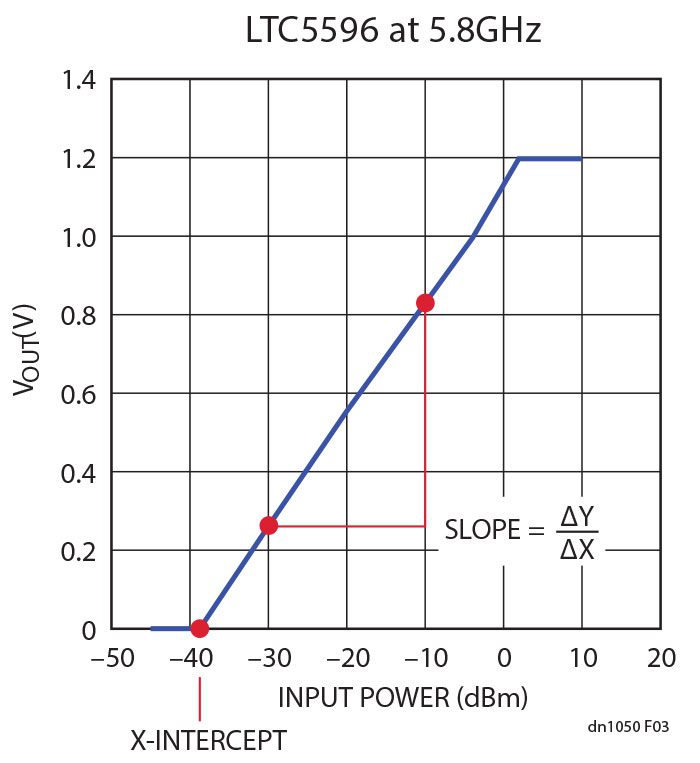
Figura 3. Diagramma VOUT su potenza d’ingresso dell’LTC5596. I due punti di calibrazione devono essere scelti in modo tale da rappresentare l’intervallo operativo dell’applicazione.
In questo esempio,
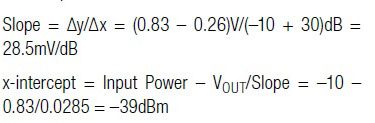
Qesti valori di pendenza e intercetta sono usati nel programma illustrato in appendice.
Errore di linearità
Sul data sheet, il “log intercept” è il punto d’intercetta x sul tracciato. L’errore di linearità è rappresentato dalla differenza tra la linea retta ideale e la potenza realmente misurata dal rivelatore. L’intervallo utile di misura si trova tipicamente dove l’errore di linearità è inferiore a 1dB. Perciò l’errore si può calcolare usando il punto d’intercetta x e la pendenza come illustrato in Figura 4, che mostra l’errore di linearità che si può ottenere da un dispositivo tipico con una calibrazione a due punti.
![]()
Curva di errore dell’LTC5596 su potenza d’ingresso a 5,8GHz
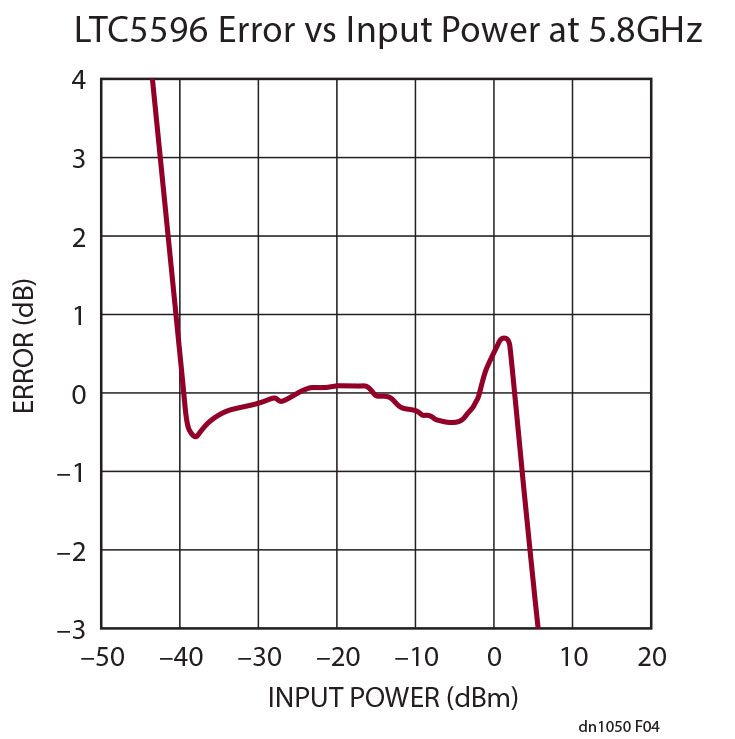
Figura 4. Diagramma della curva di errore dell’LTC5596 su potenza d’ingresso, dopo la calibrazione. L’intervallo dinamico lineare è approssimativamente tra –40dBm e +3dBm
Conclusioni
L’LTC5596 offre piccole dimensioni, semplicità e assorbimenti minimi per la misura accurata della potenza RF nell’intervallo da 100MHz a 40GHz. Rende possibili soluzioni complete, compatte, efficienti e sufficientemente accurate per soddisfare i requisiti di un misuratore portatile di potenza RF, oppure svolgere la stessa funzione in applicazioni embedded. L’overhead del firmware è ridotto al minimo, grazie al buon controllo e all’ampiezza di banda della funzione di trasferimento dell’LTC5596, che è lineare in dB. La calibrazione a due punti può essere eseguita con buona accuratezza su un’unica frequenza a centro banda, o su più frequenze per un’accuratezza maggiore. Soprattutto, il rivelatore RMS dell’LTC5596 è in grado di misurare accuratamente la potenza indipendentemente dal tipo di modulazione. Anche con una semplice calibrazione a due punti, i risultati sono accurati, con un errore inferiore a 0,3 dB, indipendente dalla forma d’onda della modulazione. Di contro, altre unità commerciali più costose richiedono procedure elaborate di calibrazione e caratterizzazione.
Appendice: esempio di codice per la scheda Linduino, per convertire in dBm la lettura dell’ADC e pilotare il display
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x3F,20,4); // set the LCD address
o 0x3F for a 20 chars and 4 line display
int analogPin = 0; //set up analog IN channel 0
double val = 0;
double slope = 0.0285; // slope in Volts per dB
double xint = -39; //log intercept in dBm @5.8GHz
double power = 0.0;
double totalval=0.0;
void setup()
{
lcd.init(); // initialize the lcd
lcd.backlight();
lcd.setCursor(0,0);
lcd.print(“LTC5596 RMS DETECTOR”);
lcd.setCursor(8,3);
lcd.print(“dBm”);
}
void loop()
{
for(int i=0;i<20;i++) // Average 20 ADC readings:
{
val = analogRead(analogPin);
delay(10);
totalval= totalval + val;
}
totalval=totalval/20.0;
power = (totalval*0.0049/slope)+xint; // Convert to Volts,
calculate dBm
lcd.setCursor(0,3);
lcd.print(power);
}