Non ci sono prodotti a carrello.
Questo progetto è stato ispirato dalla visione di una barca reale dotata di vari sensori in grado di misurare la profondità del fondale; abbiamo quindi pensato di costruire una barca autonoma su piccola scala per svolgere gli stessi compiti.
Questa potrebbe essere dotata dei sensori necessari e programmata per guidare lungo un percorso desiderato e raccogliere le informazioni. La barca sarebbe anche dotata di un sistema di telemetria radiofonico in modo da poterne monitorare lo stato in tempo reale.
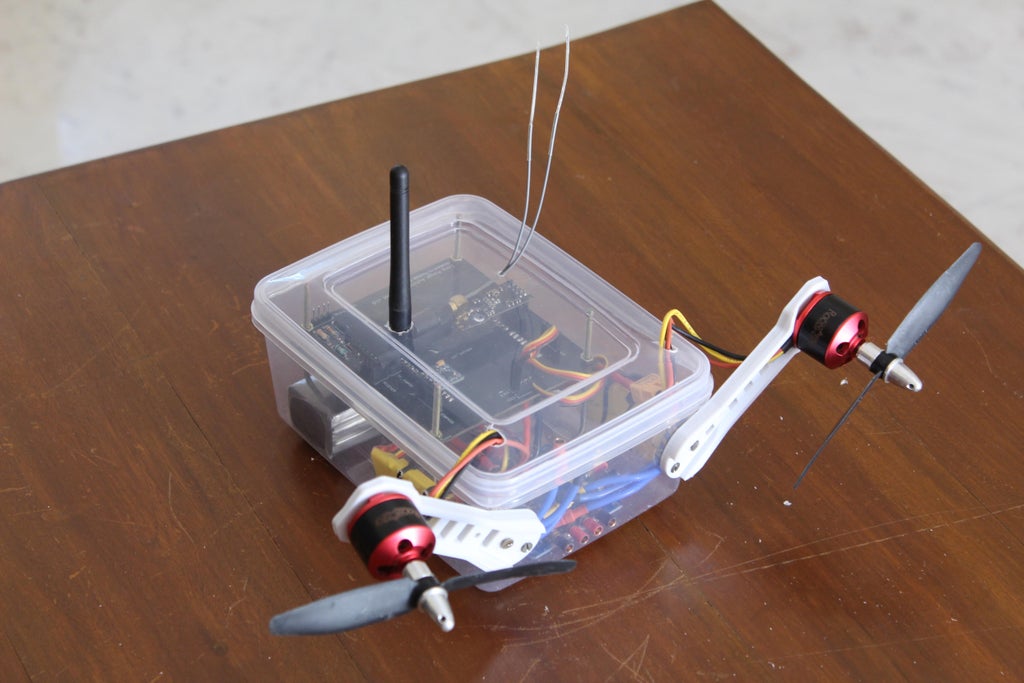
Il circuito di controllo principale della barca autonoma è basato su un PCB personalizzato progettato per contenere un Arduino UNO e i vari sensori. I file sono disponibili per poterlo riprodurre. Saldare quindi le porte e i pin necessari e montare Arduino, il modulo GPS, il modulo bussola, gli ESC, la radio di telemetria e la radio del ricevitore. Il PCB contiene anche una porta per controllare la tensione delle celle della batteria LiPo.

3 Commenti